
 Я ни раз задавал сам себе вопрос, с какого бы языка начинать изучение. Твёрдо отвечаю – Си, т.к. в ассме много рутины и условностей, что лишает творчества. Постоянно надо проверять и перепроверять себя, а не забыл ли ты то или иное действие. В ассме есть свои неоспоримые преимущества, но о них потом, т.к. это почувствовать можно только на практике. C языком определились. Реально Си учить не надо. Я вам так скажу – мой Си это условно десять пазлов и море логики, которые я комбинирую. Можно ничего не знать, важно понимать механизм, т.е. что на что влияет и к чему приводит. Это как игра в тетрис в котором нужно лишь крутить фигуры и плотнее их ставить. Если вы играли в тетрис (не уверен что вы знаете эту игру), то вы легко поймете что такое Си.
Я ни раз задавал сам себе вопрос, с какого бы языка начинать изучение. Твёрдо отвечаю – Си, т.к. в ассме много рутины и условностей, что лишает творчества. Постоянно надо проверять и перепроверять себя, а не забыл ли ты то или иное действие. В ассме есть свои неоспоримые преимущества, но о них потом, т.к. это почувствовать можно только на практике. C языком определились. Реально Си учить не надо. Я вам так скажу – мой Си это условно десять пазлов и море логики, которые я комбинирую. Можно ничего не знать, важно понимать механизм, т.е. что на что влияет и к чему приводит. Это как игра в тетрис в котором нужно лишь крутить фигуры и плотнее их ставить. Если вы играли в тетрис (не уверен что вы знаете эту игру), то вы легко поймете что такое Си.
Далее о макете (макетной плате). И на эту тему мне задавали вопрос. И пришел к выводу, что человеку, который не первый день в электронике делать какую-то плату или платку с кнопками и светодиодами не интересно. Школьнику мигалка, пищалка и кнопка будут интересны. Но не взрослому человеку. Тем более всё это можно сделать в Протеусе. Протеус изучается за 30 мин. Тогда вы меня спрашиваете, а что же сделать? Сделать практическое устройство по которому у вас будет цель – цель доделать это устройство до конца. Это самый главный психологический стимул.
Из каких компонентов должно быть устройство? Несколько кнопок (хоть десяток), семисегментные индикаторы 2-5 разрядов, микроконтроллер PIC16F628A (или без А) (на этом микроконтроллере можно много фантазировать), ну и оставить 1-2-3 свободные линии, чтобы что-то внешнее подключить или управлять. У меня всё начинается с идеи и вопроса что собрать и подключить к МК, и сразу думаю, а как это будет подключаться к МК и может ли работать такое подключение. Ну и собственно процесс рисования печатной платы идет в параллели. Необходимо знать и учитывать при рисовании, что не все ножки одинаково работают. И именно это важное начальное условие расписывается в самоучителе с самого начала.
В связи с этим ваша задача сейчас по моему самоучителю разобраться с выводами (ножками), как, какие, в какую сторону, при каких условиях работают эти вывода. При всей простоте задачи вы столкнетесь с массой других несложных вещей, которые нужно изучить.
Что в итоге вы получите?
1) Понимание как, что и с чем соединять.
2) Как управляются эти соединения на элементарном уровне.
3) Начнете привыкать к интерфейсу среды разработки.
4) Начнете изучать структуру текста программы.
5) Начнете понимать механизм работы программы.
Важное условие – вдумчиво читать подряд. Вдумчиво и подряд. Возможно перечитывать.
Мир вам.
Введение
PIC-контроллеры остаются популярными в тех случаях, когда требуется создать недорогую компактную систему с низким энергопотреблением, не предъявляющую высоких требований по ее управлению. Эти контроллеры позволяют заменить аппаратную логику гибкими программными средствами, которые взаимодействуют с внешними устройствами через хорошие порты.
Миниатюрные PIC контроллеры хороши для построения преобразователей интерфейсов последовательной передачи данных, для реализации функций «прием – обработка – передача данных» и несложных регуляторов систем автоматического управления.
Компания Microchip распространяет MPLAB — бесплатную интегрированную среду редактирования и отладки программ, которая записывает бинарные файлы в микроконтроллеры PIC через программаторы.
Взаимодействие MPLAB и Matlab/Simulink позволяет разрабатывать программы для PIC-контроллеров в среде Simulink — графического моделирования и анализа динамических систем. В этой работе рассматриваются средства программирования PIC контроллеров: MPLAB, Matlab/Simulink и программатор PIC-KIT3 в следующих разделах.
• Характеристики миниатюрного PIC контроллера PIC12F629
• Интегрированная среда разработки MPLAB IDE
• Подключение Matlab/Simulink к MPLAB
• Подключение программатора PIC-KIT3
Характеристики миниатюрного PIC-контроллера
Семейство РIС12ххх содержит контроллеры в миниатюрном 8–выводном корпусе со встроенным тактовым генератором. Контроллеры имеют RISC–архитектуру и обеспечивают выполнение большинства команд процессора за один машинный цикл.
Для примера, ниже даны характеристики недорогого компактного 8-разрядного контроллера PIC12F629 с многофункциональными портами, малым потреблением и широким диапазоном питания [1].
• Архитектура: RISC
• Напряжение питания VDD: от 2,0В до 5,5В ( >path без аргументов приводит к отображению списка путей переменной path в окне команд (Command Window). Удалить путь из переменной path можно командой rmpath, например:
4. Создайте Simulink модель для PIC контроллера, используя блоки библиотеки «Embedded Target for Microchip dsPIC» (Рис. 13), или загрузите готовую модель, например, Servo_ADC.mdl.
Тип контроллера, для которого разрабатывается Simulink модель, выбирается из списка в блоке Master > PIC (Рис. 16, Рис. 10), который должен быть включен в состав модели.

Рис. 16. Выбор типа контроллера в блоке Master модели.
5. Проверьте настройки конфигурации модели: Меню → Simulation → Configuration Parameters . В строке ввода System target file раздела Code Generation должен быть указан компилятор S-функций dspic.tlc (Рис. 17). Выбор dspic.tlc настраивает все остальные параметры конфигурации модели, включая шаг и метод интегрирования.
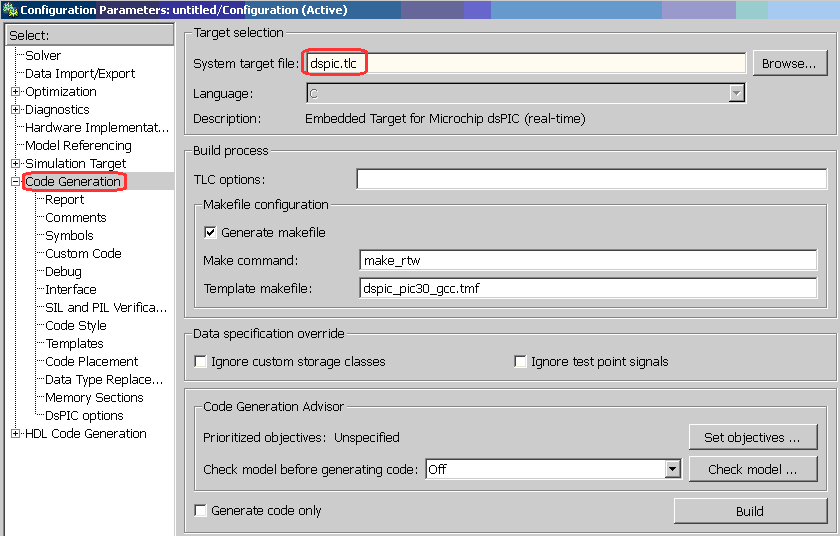
Рис. 17. Выбор компилятора S-функций dspic.tlc для моделей PIC-контроллеров в разделе «основное меню → Simulation → Configuration Parameters → Code Generation».
6. Откомпилируйте модель tmp_Servo_ADC.mdl. Запуск компилятора показан на Рис. 18.
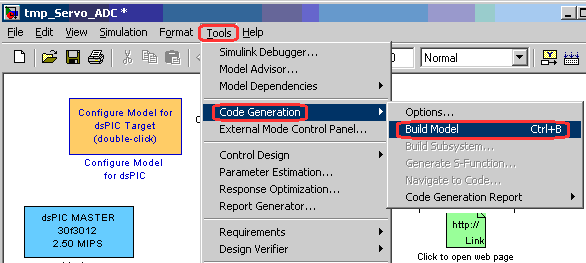
Рис. 18. Запуск компилятора Simulink модели.
В результате успешной компиляции (сообщение: ### Successful completion of build procedure for model: Servo_ADC) в текущем каталоге создаются HEX файл для прошивки PIC контроллера и MCP проект среды MPLAB (Рис. 19).

Рис. 19. Результаты компиляции модели.
Запуск модели в Matlab/Simulink выполняется в окне модели кнопкой, условное время моделирования устанавливается в строке:

Управление компиляцией Simulink моделей из среды MPLAB
Управление компиляцией Simulink модели можно выполнять командами раздела Matlab/Simulink среды MPLAB, например, в следующем порядке.
1. Разработайте модель PIC контроллера в Matlab/Simulink. Сохраните модель.
2. Запустите MPLAB.
3. Выберите MPLAB меню → Tools → Matlab/Simulink и новый раздел появится в составе меню.
4. В разделе Matlab/Simulink откройте Simulink модель, например, Servo_ADC, командой «Matlab/Simulink → Specify Simulink Model Name → Open → File name → Servo_ADC.mdl → Open». Команда Open запускает Matlab и открывает модель.
5. Откомпилируйте модель и создайте MCP проект командами Generate Codes или Generate Codes and Import Files. Перевод MDL модели в MCP проект выполняется TLC компилятором Matlab.
В результате создаётся проект MPLAB:

со скриптами модели на языке Си.
6. Откройте проект: меню → Project → Open → Servo_ADC.mcp (Рис. 20).

Рис. 20. Структура MCP проекта Simulink модели Servo_ADC.mdl в среде MPLAB.
Проект Simulink модели готов для редактирования, отладки и компиляции в машинные коды контроллера средствами MPLAB.
Подключение программатора PIC-KIT3
Узнать какие программаторы записывают бинарный код в конкретный микроконтроллер можно в разделе меню → Configure → Select Device среды MPLAB 8.92. Например, программатор PIC-KIT3 не поддерживает контроллер PIC12C508A (Рис. 21, левый рисунок), но работает с контроллером PIC12F629 (Рис. 21, правый рисунок).

Рис. 21. Перечень программаторов для прошивки микроконтроллера.
Информацию об установленном драйвере программатора PIC-KIT3 можно запросить у менеджера устройств ОС Windows (Рис. 22).

Рис. 22. Информация об установленном драйвере программатора PIC-KIT3.
Схема подключения микроконтроллера PIC12F629 к программатору PIC-KIT3 показана на Рис. 23.

Рис. 23. Схема подключения микроконтроллера PIC12F629 к программатору PIC-KIT3.
Вывод PGM программатора для прошивки контроллеров PIC12F629 не используется. Наличие вывода PGM для разных типов PIC контроллеров показано на Рис. 24. Вывод PGM рекомендуется «притягивать» к общему проводу (GND), через резистор, номиналом 1К [3].

Рис. 24. Выводы PGM PIC контроллеров.
Индикация светодиодов программатора Olimex PIC-KIT3 показана в ниже:
Желтый — Красный — Состояние программатора
Вкл — Выкл — Подключен к USB линии
Вкл — Вкл — Взаимодействие с MPLAB
Мигает — Включен постоянно — Прошивка микроконтроллера
Не следует подключать питание микроконтроллера VDD (Рис. 23) к программатору, если контроллер запитывается от своего источника питания.
При питании микроконтроллера от программатора на линии VDD необходимо установить рабочее напряжение, например, 5В программой MPLAB (Menu → Programmer → Settings → Power), как показано на Рис. 25.
Примечание. При отсутствии напряжения на линии VDD MPLAB IDE выдает сообщение об ошибке: PK3Err0045: You must connect to a target device to use

Рис. 25. Установка напряжения VDD на программаторе PIC-KIT3 программой MPLAB IDE v8.92.
Если программатор не может установить требуемое напряжение, например, 5В при его питании от USB, в которой напряжение меньше 5В, MPLAB IDE выдает сообщение об ошибке: PK3Err0035: Failed to get Device ID. В этом случае, сначала необходимо измерить напряжение программатора — считать его в закладке меню → Programmer → Settings → Status, а затем установить напряжение (не больше измеренного) в закладке меню → Programmer → Settings → Power.

Рис. 26. Измерение (слева) и установка (справа) VDD напряжения программатора PIC-KIT3 программой MPLAB IDE v8.92.
Пример MPLAB сообщения успешного подключения микроконтроллера к программатору по команде меню → Programmer → Reconnect показан на Рис. 27.

Рис. 27. Сообщение MPLAB об успешном подключении микроконтроллера к программатору.
Можно программировать не только отдельный PIC контроллер, но и контроллер, находящийся в составе рабочего устройства. Для программирования PIC контроллера в составе устройства необходимо предусмотреть установку перемычек и токоограничивающих резисторов как показано на Рис. 28 [3].
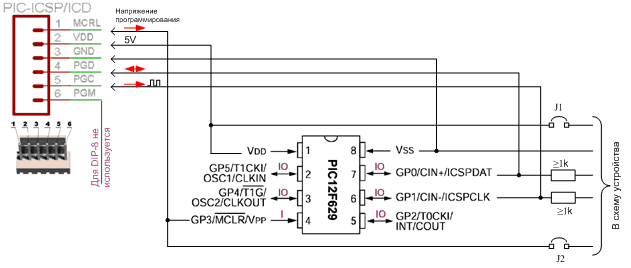
Рис. 28. Подключение микроконтроллера в составе электронного устройства к программатору.
Заключение
Малоразрядные PIC-контроллеры имеют широкий диапазон питания, низкое потребление и малые габариты. Они программируются на языках низкого уровня. Разработка программ на языке графического программирования Simulink с использованием многочисленных библиотек значительно сокращает время разработки и отладки в сравнении с программированием на уровне ассемблера. Разработанные для PIC-контроллеров Simulink структуры можно использовать и для компьютерного моделирования динамических систем с участием контроллеров. Однако, из-за избыточности кода такой подход применим только для семейств PIC контроллеров с достаточными ресурсами.
В связи с нововведениями на сайте, решил наконец-то вылезти из подполья и написать что-нибудь полезное. Ну а поскольку я программирую разные микроконтроллеры (МК) и являюсь фанатом Eclipse, то решил про это и написать. Начну со своей истории знакомства с программированием PIC, а закончу советами тем, кто по долгу службы или в силу увлечения программирует на МК семейства PIC, хотя, впрочем, эти же советы сгодятся и для других архитектур МК.
В среду железячников я попал в 2006 году на 4-м курсе учёбы в университете, когда пошёл на производственную практику в научно-технический центр, где, собственно, и работаю по сей день. В то время в нашей компании мейнстримом было использование Keil uVision2 для МК на базе C51 и ARM. Однако мне подсовывали простые задачи под PIC, вроде контроля и управления одним сигналом (кнопка вкл-выкл), и моей первой средой разработки были блокноты — бумажный и компьютерный, плюс книжки бумажные по PIC. Выглядела моя среда разработки примерно так:
Для компиляции файлов мне выдали экзешник компилятора и bat-файл, который использовался мной совершенно бездумно — даже не знаю, что за компилятор там был. В общем, суровые были времена…

Потом был MPASM, но он убогий и мне про него почти нечего вспоминать. По-моему, под него я также писал в блокноте программки.
MPLAB IDE
По мере совершенствования своих навыков я узнал, что вместо блокнота можно использовать наикрутейшую, как мне тогда казалось, MPLAB IDE:
В её состав входят:
- CC18 и ещё какой-то компилятор, которые можно выбирать в настройках проекта;
- хороший набор библиотечных функций;
- подключаемые inc-файлы описания МК семейства PIC, заточенные под использование в ассемблере;
- встроенный отладчик и программатор;
- Но главное — поддержка языка Си — это был для меня глоток свежего воздуха!
Хотя, если присмотреться к этой среде разработки, её убогость и отсталость могут отпугнуть любого мало-мальски привыкшего к хорошим условиям программиста, но я тогда об этом не знал. Справку по встроенным библиотечным функциям надо открывать отдельно и искать, что, где и как называется. Для новичков — непосильная задача. Тем не менее, на тематических форумах люди до сих пор спрашивают, какой компилятор лучше использовать; кто-то так и продолжает использовать MPLAB IDE.
MikroC
Задачи для PIC мне подкидывали всё реже и реже, начали набирать обороты разработки с МК серии C51, ARM7 (не путать с ARMv7!), Cortex-M. Но иногда ко мне снова обращались за помощью в написании программ под PIC, а я в силу любопытства пробовал новые средства разработки.
К тому времени уже давно и активно программировал в Keil uVision3 — возвращаться к допотопному MBLAB IDE совершенно не хотелось. Так я познакомился с MikroC, который поставляется вместе с программаторами PICKit:
Набор плюшек почти такой же как в MBLAB IDE, но всё же побогаче:
- свой собственный компилятор
- встроенные библиотеки функций с удобным поиском и доступным описанием;
- подключаемые h-файлы описания МК семейства PIC;
- набор дополнительных внешних утилит
- широкий спектр примеров с исходниками
- встроенный отладчик и программатор;
- встроенные вкладки открытых файлов;
- навигация по функциям в файле
Честно, для маленьких простых проектов, которые и составляют основную нишу программ под PIC, этого вполне достаточно. Даже новички нормально разбираются с помощью справки и быстро делают рабочий код. Большинство наших разработчиков, имеющих дело с PIC, используют эту среду при разработке.
Так или иначе, сделав очередной проект в MikroC, я благополучно забыл про PIC’и и думал, что уже никогда к ним не вернусь.
Однако история любит повторяться!
Через 3 года, в 2013 году, появилась задача разработать ПО по готовой КД, в которой был заложен PIC18F4680. Честно, я даже не знал, что среди PIC’ов бывают такие монстры, всегда имел дело только с мелочью!
Задачи были нетривиальные — реализация загрузчика для внутрисхемного обновления ПО, работа в режиме жёсткого реального времени, работа с АЦП, внешними ЦАП, линиями управления, несколькими таймерами-компараторами.
Кстати, немного отвлекаясь от темы: только на этом проекте я в полной мере понял, что такое банки памяти в PIC, как они работают и какие ограничения накладывают на разработку ПО. К примеру, все банки у МК по 256 байт. И хоть убейся, но для PIC нельзя создать структуру, превыщающую по объёму эти 256 байт — ограничение всплыло наружу при реализации протокола обмена, ну да ладно, проехали…
К этому времени Keil uVision3 мне уже изрядно поднадоел, поскольку сложность проектов росла и мне не хватало имевшегося в Keil функционала. Где-то с 2011 года я освоил Eclipse, GCC, синтаксис makefile — и все свои проекты начал вести с использованием этих инструментов. К тому же, у меня уже был опыт применения связки Eclipse + SDCC для реализации проекта под C51 МК. После появления Keil uVision4 я его установил, протестировал пол-часика и снёс, ибо по удобству программирования он всё равно сильно отстаёт от Eclipse.
Eclipse + SDCC
В настоящее время Eclipse де-факто является стандартом в области разработки ПО для встраиваемых систем. Вот список IDE, основанных на Eclipse, от популярных брендов:

Главной проблемой чистого Eclipse для разработки на C/C++ под МК является сложность вхождения в него железячных программистов, замена привычных инструментов, работающих после установки в 1-2 клика, на какие-то плагины, требующие настройки, или, что ещё хуже, на вручную написанные makefile — всё это требует значительных первоначальных усилий по чтению и изучению документации, поиску помощи и пособий для начинающих в интернете. Говорю как человек, имеющий опыт по переводу команды программистов-железячников на Eclipse.
Однако, за месяц полностью освоив синтаксис и один раз написав качественный makefile, все остальные проекты создаются по накатанному шаблону и требуют лишь минимальной индивидуальной настройки.
Также пришлось сделать ряд дополнительных телодвижений по настройке проектов под PIC — по умолчанию Eclipse понимает синтаксис GCC. Различные макросы и директивы, встроенные в другие компиляторы (будь то СС18 или SDCC), приходится разделять на этапе компиляции и на этапе индексации проекта. Чтобы при навигации в коде редактор не выдавал ложных ошибок на неизвестные директивы, к исходникам проекта подключается файл eclipse-syntax.h:
Эпилог
Как видно, в итоге я пришёл к использованию связки Eclipse с внешними компиляторами. Изучение опций компиляции — дело нужное и не столь сложное, чтобы просто так от него отказываться — любой программист сможет их изучить и применить при необходимости. Думаю, в итоге у меня получилась идеальная связка, доступная на сегодняшний день для создания проектов под PIC.
Собирая воедино все средства разработки, вот список компиляторов, которыми я пользуюсь в связке с Eclipse и получаю от этого истинное удовольствие при программировании:
- CC18 для PIC
- SDCC для C51
- gnu-arm-embedded для ARM7 и Cortex-M
- MinGW для x86
Очевидно, при необходимости список может легко дополняться.
Надеюсь, прочитав мою историю, кто-то решится наконец для себя сойти со старых IDE и освоить новые.